ROS2 Journey XI
1. C++ Version
When nodes communicate using services, the node that sends a request for data is called the client node, and the one that responds to the request is the service node. The structure of the request and response is determined by a .srv file.
1.1 Create a package
ros2 pkg create --build-type ament_cmake cpp_srvcli --dependencies rclcpp example_interfaces
.srv文件
int64 a
int64 b
---
int64 sum
package.xml
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>cpp_srvcli</name>
<version>0.0.0</version>
<description>C++ client server tutorial</description>
<maintainer email="dulics811@gmail.com">parallels</maintainer>
<license>Apache License 2.0</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<depend>rclcpp</depend>
<depend>example_interfaces</depend>
<test_depend>ament_lint_auto</test_depend>
<test_depend>ament_lint_common</test_depend>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>
Inside the ros2_ws/src/cpp_srvcli/src directory, create a new file called add_two_ints_server.cpp and paste the following code within:
#include "rclcpp/rclcpp.hpp"
#include "example_interfaces/srv/add_two_ints.hpp"
#include <memory>
void add(const std::shared_ptr<example_interfaces::srv::AddTwoInts::Request> request,
std::shared_ptr<example_interfaces::srv::AddTwoInts::Response> response)
{
response->sum = request->a + request->b;
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "Incoming request\na: %ld" " b: %ld",
request->a, request->b);
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "sending back response: [%ld]", (long int)response->sum);
}
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
std::shared_ptr<rclcpp::Node> node = rclcpp::Node::make_shared("add_two_ints_server");
rclcpp::Service<example_interfaces::srv::AddTwoInts>::SharedPtr service =
node->create_service<example_interfaces::srv::AddTwoInts>("add_two_ints", &add);
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "Ready to add two ints.");
rclcpp::spin(node);
rclcpp::shutdown();
}
The add_executable macro generates an executable you can run using ros2 run. Add the following code block to CMakeLists.txt to create an executable named server:
add_executable(server src/add_two_ints_server.cpp)
ament_target_dependencies(server
rclcpp example_interfaces)
1.3 Write the client node
Inside the ros2_ws/src/cpp_srvcli/src directory, create a new file called add_two_ints_client.cpp and paste the following code within:
#include "rclcpp/rclcpp.hpp"
#include "example_interfaces/srv/add_two_ints.hpp"
#include <chrono>
#include <cstdlib>
#include <memory>
using namespace std::chrono_literals;
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
if (argc != 3) {
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "usage: add_two_ints_client X Y");
return 1;
}
std::shared_ptr<rclcpp::Node> node = rclcpp::Node::make_shared("add_two_ints_client");
rclcpp::Client<example_interfaces::srv::AddTwoInts>::SharedPtr client =
node->create_client<example_interfaces::srv::AddTwoInts>("add_two_ints");
auto request = std::make_shared<example_interfaces::srv::AddTwoInts::Request>();
request->a = atoll(argv[1]);
request->b = atoll(argv[2]);
while (!client->wait_for_service(1s)) {
if (!rclcpp::ok()) {
RCLCPP_ERROR(rclcpp::get_logger("rclcpp"), "Interrupted while waiting for the service. Exiting.");
return 0;
}
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "service not available, waiting again...");
}
auto result = client->async_send_request(request);
// Wait for the result.
if (rclcpp::spin_until_future_complete(node, result) ==
rclcpp::FutureReturnCode::SUCCESS)
{
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "Sum: %ld", result.get()->sum);
} else {
RCLCPP_ERROR(rclcpp::get_logger("rclcpp"), "Failed to call service add_two_ints");
}
rclcpp::shutdown();
return 0;
}
Return to CMakeLists.txt to add the executable and target for the new node. After removing some unnecessary boilerplate from the automatically generated file, your CMakeLists.txtshould look like this:
cmake_minimum_required(VERSION 3.8)
project(cpp_srvcli)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(example_interfaces REQUIRED)
add_executable(server src/add_two_ints_server.cpp)
ament_target_dependencies(server
rclcpp example_interfaces)
add_executable(client src/add_two_ints_client.cpp)
ament_target_dependencies(client
rclcpp example_interfaces)
install(TARGETS
server
client
DESTINATION lib/${PROJECT_NAME})
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# comment the line when a copyright and license is added to all source files
set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# comment the line when this package is in a git repo and when
# a copyright and license is added to all source files
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
ament_package()
1.4 Build and run
rosdep install -i --from-path src --rosdistro humble -y
colcon build --packages-select cpp_srvcli
. install/setup.bash
ros2 run cpp_srvcli server
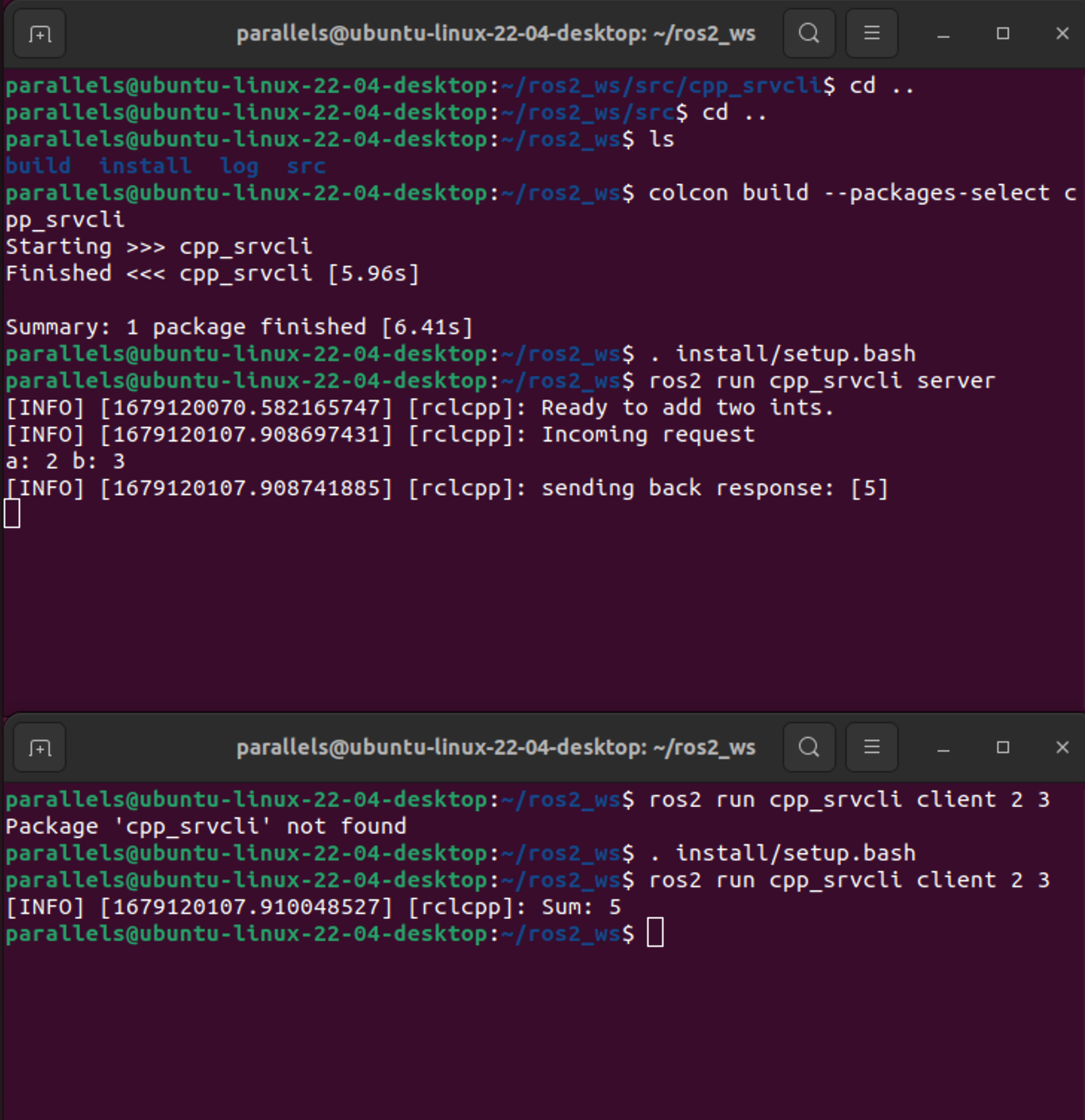
You created two nodes to request and respond to data over a service. You added their dependencies and executables to the package configuration files so that you could build and run them, and see a service/client system at work
2.Python Version
2.1 Create a package
ros2 pkg create --build-type ament_python py_srvcli --dependencies rclpy example_interfaces
The --dependencies argument will automatically add the necessary dependency lines to package.xml. example_interfaces is the package that includes the .srv file you will need to structure your requests and responses:
As always, though, make sure to add the description, maintainer email and name, and license information to package.xml.
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>py_srvcli</name>
<version>0.0.0</version>
<description>Python client server tutorial</description>
<maintainer email="dulics811@gmail.com">parallels</maintainer>
<license>Apache License 2.0</license>
<depend>rclpy</depend>
<depend>example_interfaces</depend>
<test_depend>ament_copyright</test_depend>
<test_depend>ament_flake8</test_depend>
<test_depend>ament_pep257</test_depend>
<test_depend>python3-pytest</test_depend>
<export>
<build_type>ament_python</build_type>
</export>
</package>
Add the same information to the setup.py file for the maintainer, maintainer_email, description and license fields:
from setuptools import setup
package_name = 'py_srvcli'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='Du Li',
maintainer_email='dulics811@gmail.com',
description='Python client server tutorial',
license='Apache License 2.0',
tests_require=['pytest'],
entry_points={
'console_scripts': [
],
},
)
2.2 Write the service node
Inside the ros2_ws/src/py_srvcli/py_srvcli directory, create a new file called service_member_function.py and paste the following code within:
from example_interfaces.srv import AddTwoInts
import rclpy
from rclpy.node import Node
class MinimalService(Node):
def __init__(self):
super().__init__('minimal_service')
self.srv = self.create_service(AddTwoInts, 'add_two_ints', self.add_two_ints_callback)
def add_two_ints_callback(self, request, response):
response.sum = request.a + request.b
self.get_logger().info('Incoming request\na: %d b: %d' % (request.a, request.b))
return response
def main():
rclpy.init()
minimal_service = MinimalService()
rclpy.spin(minimal_service)
rclpy.shutdown()
if __name__ == '__main__':
main()
To allow the ros2 run command to run your node, you must add the entry point to setup.py (located in the ros2_ws/src/py_srvcli directory).
Add the following line between the 'console_scripts': brackets:
'service = py_srvcli.service_member_function:main',
2.3 Write the client node
Inside the ros2_ws/src/py_srvcli/py_srvcli directory, create a new file called client_member_function.py and paste the following code within:
import sys
from example_interfaces.srv import AddTwoInts
import rclpy
from rclpy.node import Node
class MinimalClientAsync(Node):
def __init__(self):
super().__init__('minimal_client_async')
self.cli = self.create_client(AddTwoInts, 'add_two_ints')
while not self.cli.wait_for_service(timeout_sec=1.0):
self.get_logger().info('service not available, waiting again...')
self.req = AddTwoInts.Request()
def send_request(self, a, b):
self.req.a = a
self.req.b = b
self.future = self.cli.call_async(self.req)
rclpy.spin_until_future_complete(self, self.future)
return self.future.result()
def main():
rclpy.init()
minimal_client = MinimalClientAsync()
response = minimal_client.send_request(int(sys.argv[1]), int(sys.argv[2]))
minimal_client.get_logger().info(
'Result of add_two_ints: for %d + %d = %d' %
(int(sys.argv[1]), int(sys.argv[2]), response.sum))
minimal_client.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
这段代码是一个ROS 2的客户端程序,用于调用名为“add_two_ints”的ROS服务。程序首先通过导入ROS 2相关的Python包,实例化了一个名为MinimalClientAsync的Node节点,并在该节点中创建了一个用于调用“add_two_ints”服务的客户端对象。然后,程序等待ROS 2服务可用,等待时间为1秒。接下来,程序将通过终端传入的两个整数参数a和b,构造一个AddTwoInts.Request对象,通过客户端对象异步调用服务,并通过rclpy.spin_until_future_complete()方法等待异步调用结果。最后,程序将调用结果输出到终端,并关闭ROS 2节点。
The entry_points field of your setup.py file should look like this:
entry_points={
'console_scripts': [
'service = py_srvcli.service_member_function:main',
'client = py_srvcli.client_member_function:main',
],
},
2.4 Build and run
colcon build --packages-select py_srvcli
. install/setup.bash
ros2 run py_srvcli service
ros2 run py_srvcli client 2 3
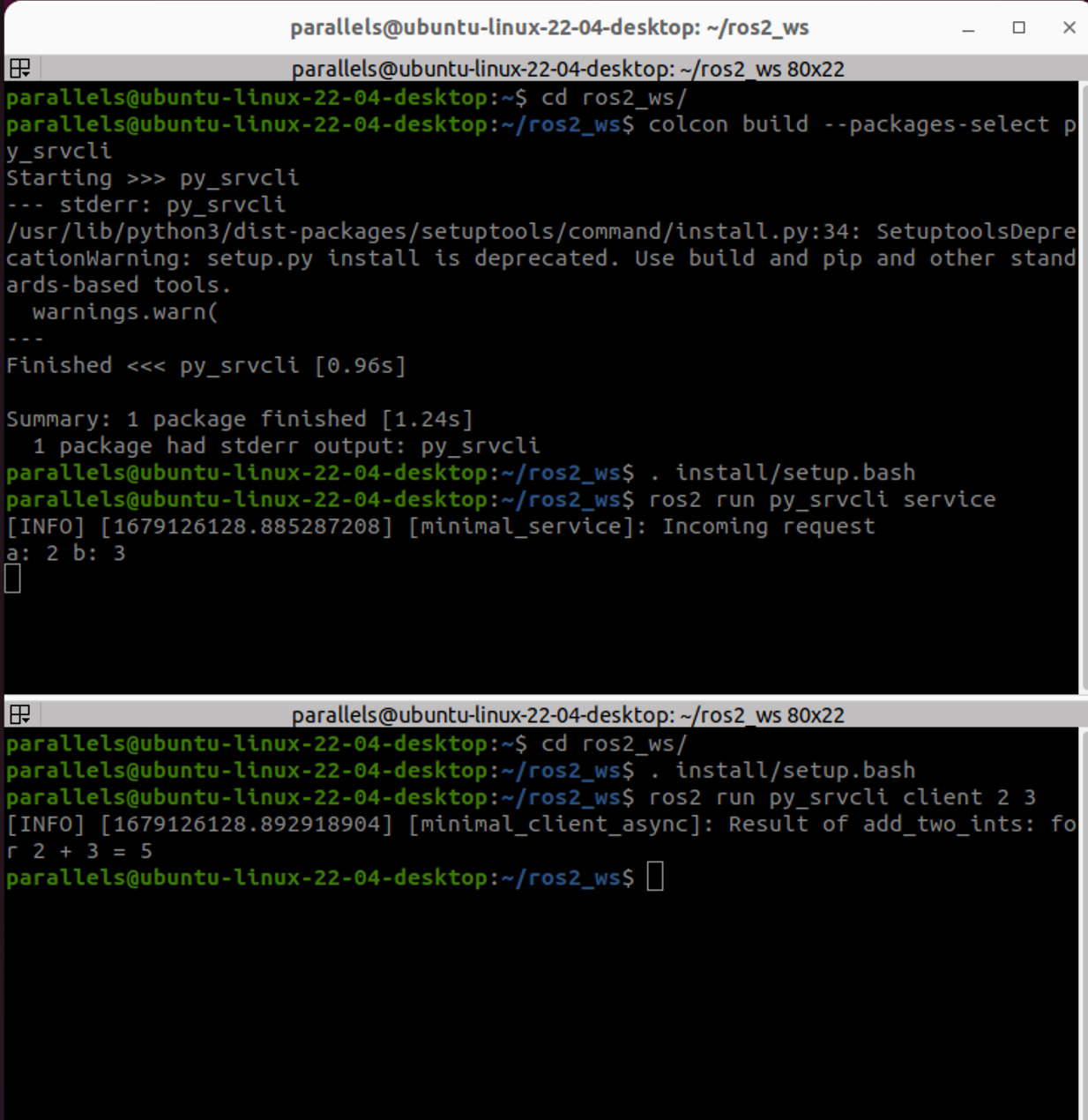
You created two nodes to request and respond to data over a service. You added their dependencies and executables to the package configuration files so that you could build and run them, allowing you to see a service/client system at work.