ROS2 Journey VI
1. Background
Actions是一种通信类型,主要面向长时运行的任务。包含三个方面:goal, feedback, and a result。
Actions基于topics和services构建。功能上近似于services,actions可以被取消。同时还提供稳定的反馈,相对的,services返回一个单一的response。
Actions使用client- server 模型。Action client节点传递goal到action server节点认可goal并返回反馈流和结果。
Tasks
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key

以上是/teleop_turtle的显示。
每当完成一个动作就会有如下显示。
按下F可以取消。
[INFO] [turtlesim]: Rotation goal canceled
在上一个动作结束前也可以取消。
the /turtle1/rotate_absolute action for /turtlesimis under Action Servers. This means /turtlesim responds to and provides feedback for the /turtle1/rotate_absolute action.
The /teleop_turtle node has the name /turtle1/rotate_absolute under Action Clients meaning that it sends goals for that action name.
ros2 action list和ros2 action list -t可以查看action和类型。

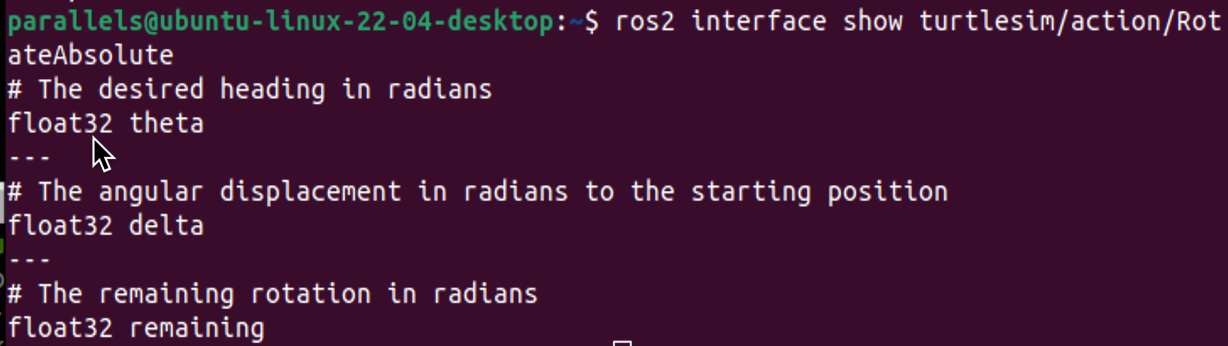
依旧可以查看接口。
ros2 interface show turtlesim/action/RotateAbsolute
ros2 action send_goal <action_name> <action_type> <values>
这个values应该是一个YAML格式的。
ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute "{theta: 1.57}"
`Waiting for an action server to become available… Sending goal: theta: 1.57
Goal accepted with ID: f8db8f44410849eaa93d3feb747dd444
Result: delta: -1.568000316619873
Goal finished with status: SUCCEEDED`
还可以用--feedback查看反馈。
ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute "{theta: -1.57}" --feedback
`Sending goal: theta: -1.57
Goal accepted with ID: e6092c831f994afda92f0086f220da27
Feedback: remaining: -3.1268222332000732
Feedback: remaining: -3.1108222007751465
…
Result: delta: 3.1200008392333984
Goal finished with status: SUCCEEDED`
Summary
Actions are like services that allow you to execute long running tasks, provide regular feedback, and are cancelable.
A robot system would likely use actions for navigation. An action goal could tell a robot to travel to a position. While the robot navigates to the position, it can send updates along the way (i.e. feedback), and then a final result message once it’s reached its destination.
Turtlesim has an action server that action clients can send goals to for rotating turtles. In this tutorial, you introspected that action, /turtle1/rotate_absolute, to get a better idea of what actions are and how they work.