ROS2 Journey IV
1. Background
Services是另一种节点间通信的方式。Service基于call-and-response 模型,对应着的是topic的publisher- subscriber模型。对比来说,topic可以让节点持续的更新数据,services知识在被client请求时才传数据。
Tasks
1. Setup
打开/turtlesim and /teleop_turtle
运行ros2 service list
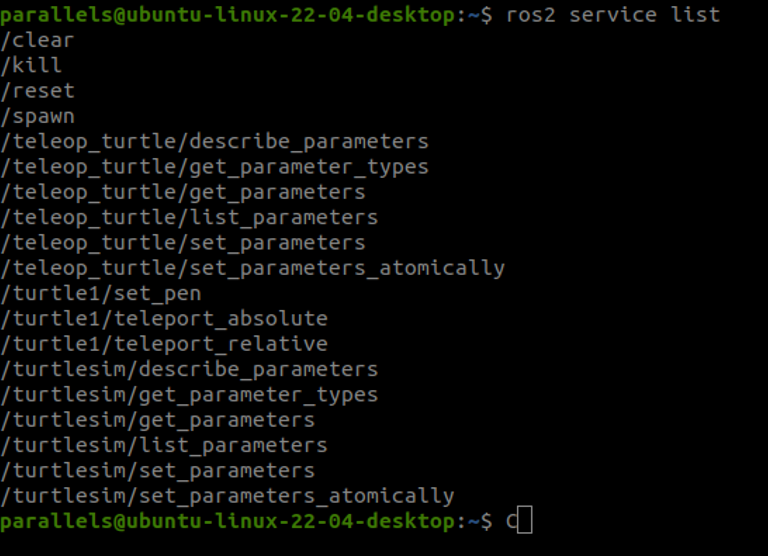
每个节点有6个service
2. ros2 service type
ros2 service type <service_name>
ros2 service type /clear

这里的Empty指当请求时不接收任何数据。
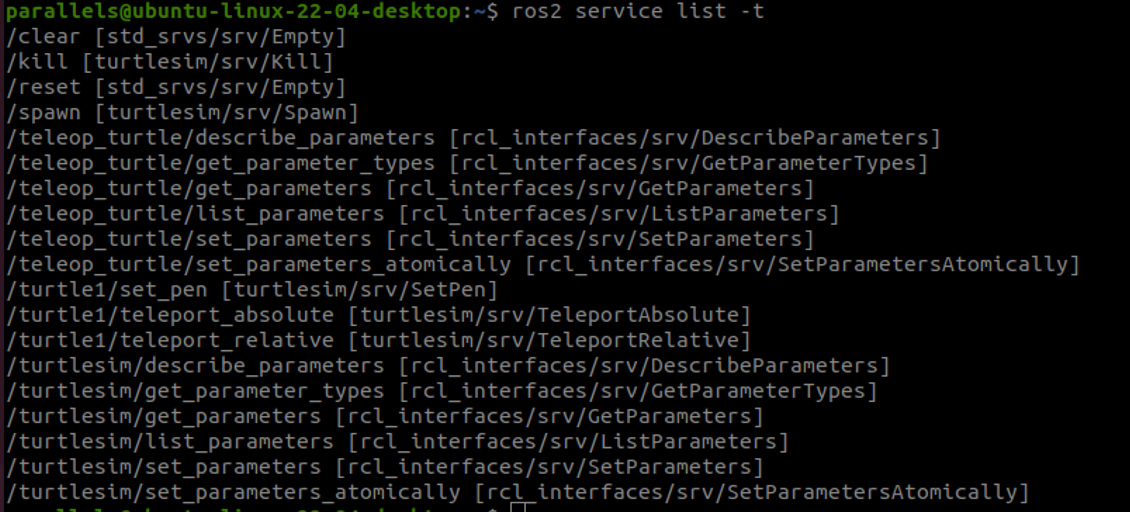
ros2 service list -t可以查看service的类型。
ros2 service find std_srvs/srv/Empty
可以返回所有Empty类型的services。
ros2 interface show <type_name>
如果想要手动请求service,需要首先知道输入的结构。就可以用interface来查看。

接下来我们就可以call。
ros2 service call /clear std_srvs/srv/Empty
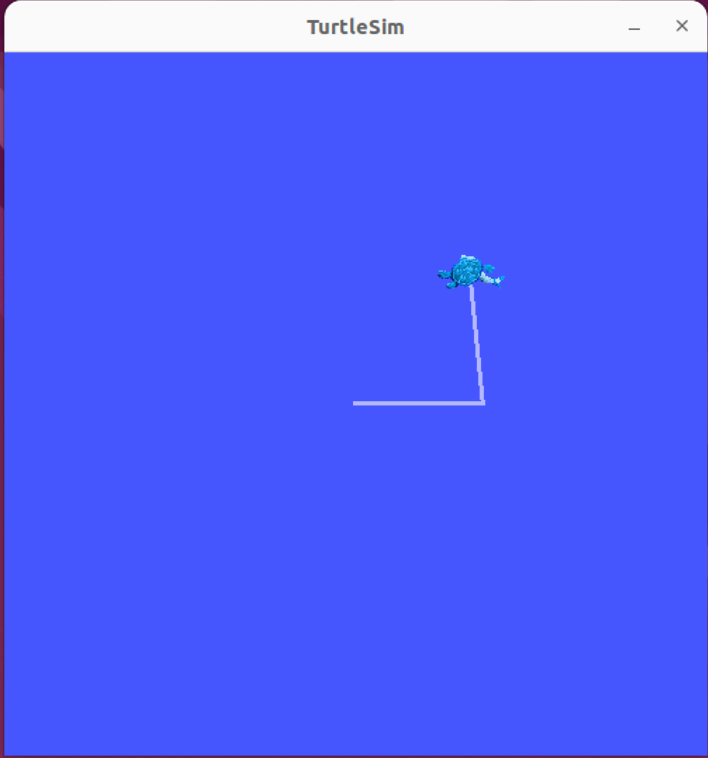
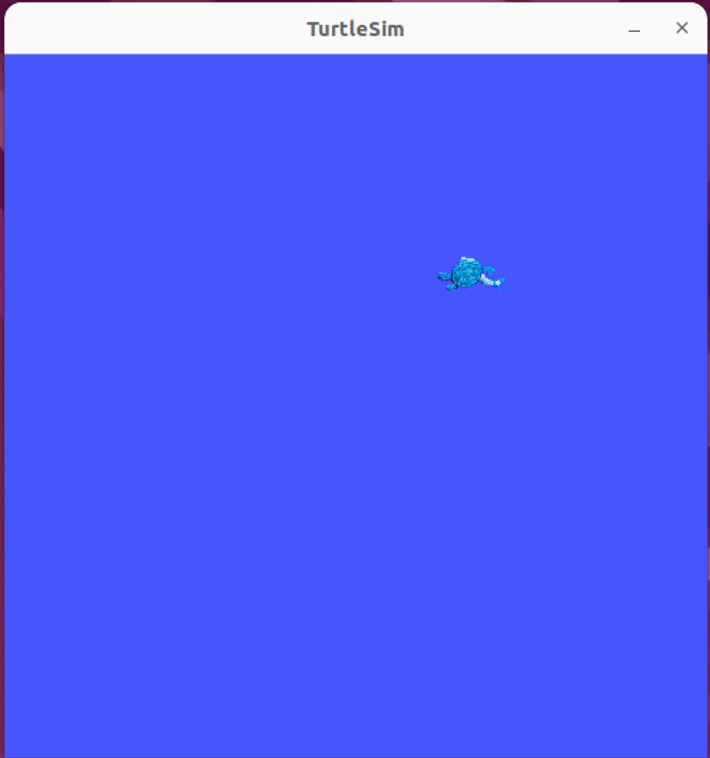
轨迹被清除掉了。
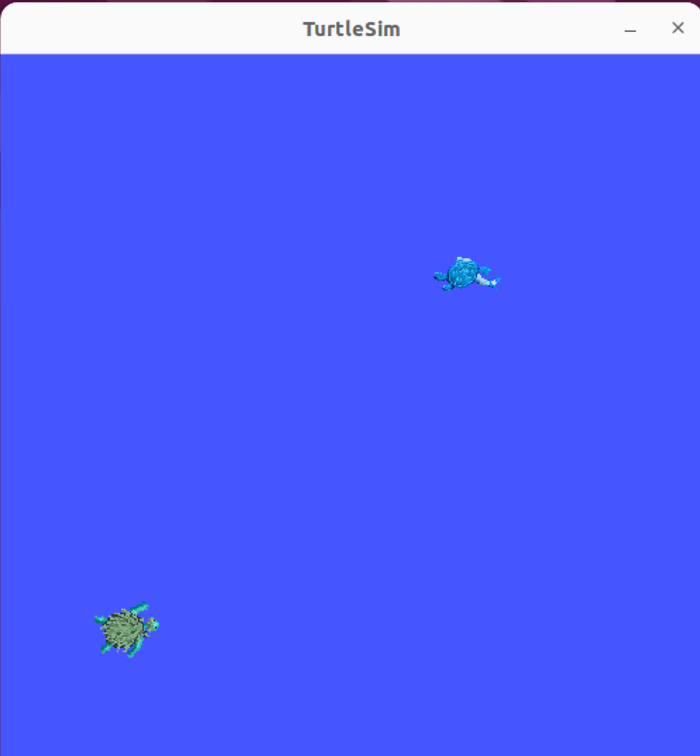
ros2 service call /spawn turtlesim/srv/Spawn "{x: 2, y: 2, theta: 0.2, name: ''}"
生成了一个新的turtle。
Summary
Nodes can communicate using services in ROS 2. Unlike a topic - a one way communication pattern where a node publishes information that can be consumed by one or more subscribers - a service is a request/response pattern where a client makes a request to a node providing the service and the service processes the request and generates a response.
You generally don’t want to use a service for continuous calls; topics or even actions would be better suited.