ROS2 Journey I
从今天开始更新ROS2的系列。这一切的起因都源于一直以来想造车的冲动。同时也希望做一个能够持续迭代的项目。这个ROS2 Journey的系列应该可以持续更新下去,下周和学生一起开始一边做项目一边学习。
Installation
1. ROS or ROS2?
ROS还是ROS2想必是每一个学习ROS的人都会面临的第一个选择,ROS2作为ROS的进化版本,支持了很多新的特性,在ROS继续主导机器人领域的前提下,选择ROS2想必是更好的选择,缺点可能是资源较少,不过没关系,这也都是探索的过程。
ROS2有一系列版本,官网上ROS和ROS2最新的版本如下图所示。
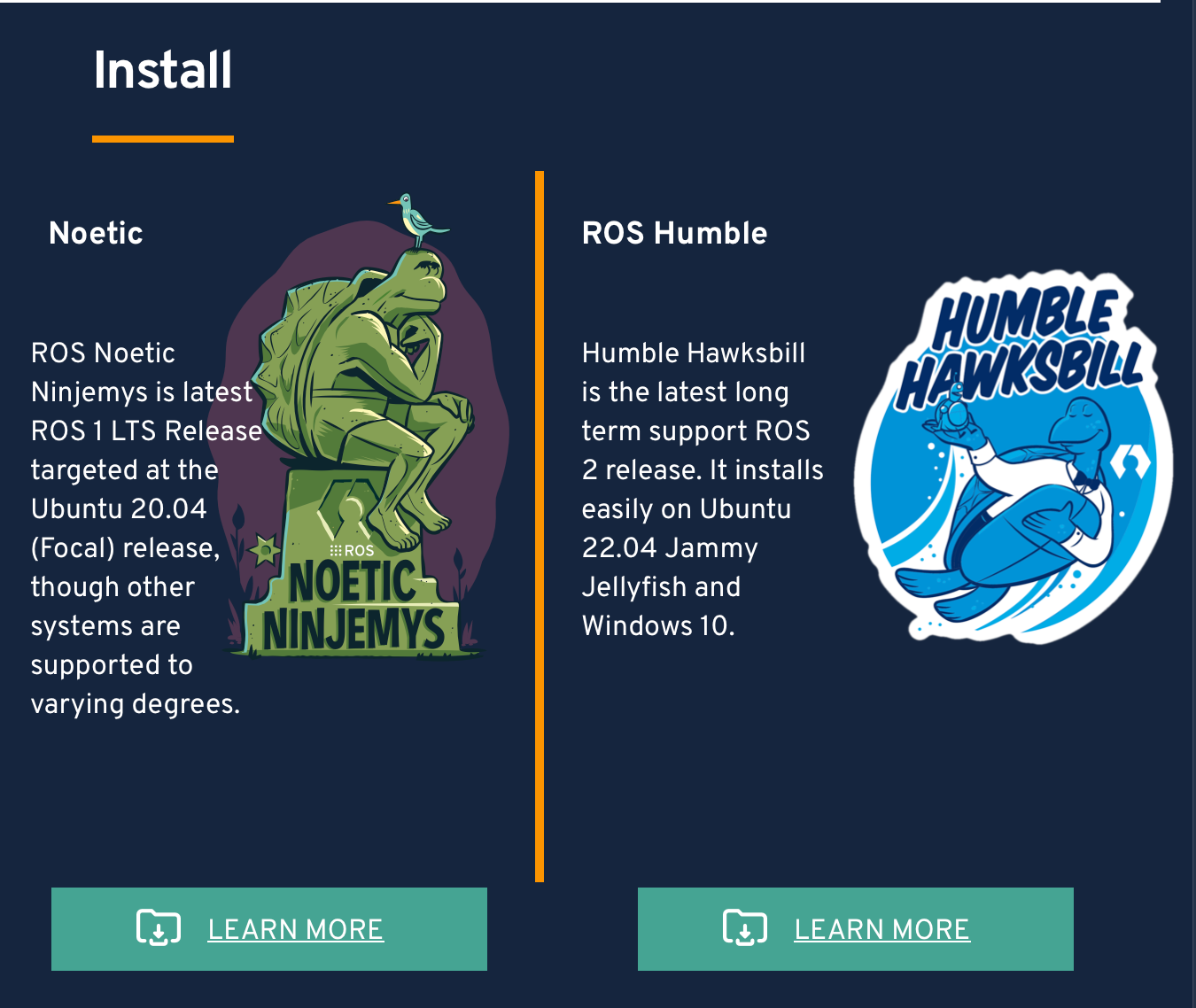
ROS的最新版本是Noetic,对应的是Ubuntu20.04。ROS2的最新版本是Humble,对应Ubuntu22.04。既然选择了ROS2,那自然就是ROS Humble了。值得一提的是,这个Hawksbill是玳瑁。
2. 安装
Mac我选择在虚拟机安装Ubuntu22.04的方式安装ROS2,这也是目前来看较为便捷的方式。虚拟机软件Mac上还是选择Parallels Desktop,PD上安装Ubuntu相对简单,直接用自带的安装就可以安装ARM版的Ubuntu22.04。

ROS2的安装也比较简单,跟着官方的Tutorial就可以成功,主要还是需要科学上网。但是其中也遇到个别问题,这里简单总结一下。
首先第一个运行sudo apt update的时候提示 The following signatures couldn’t be verified because the public key is not available: NO_PUBKEY F42ED6FBAB17C654。解决办法
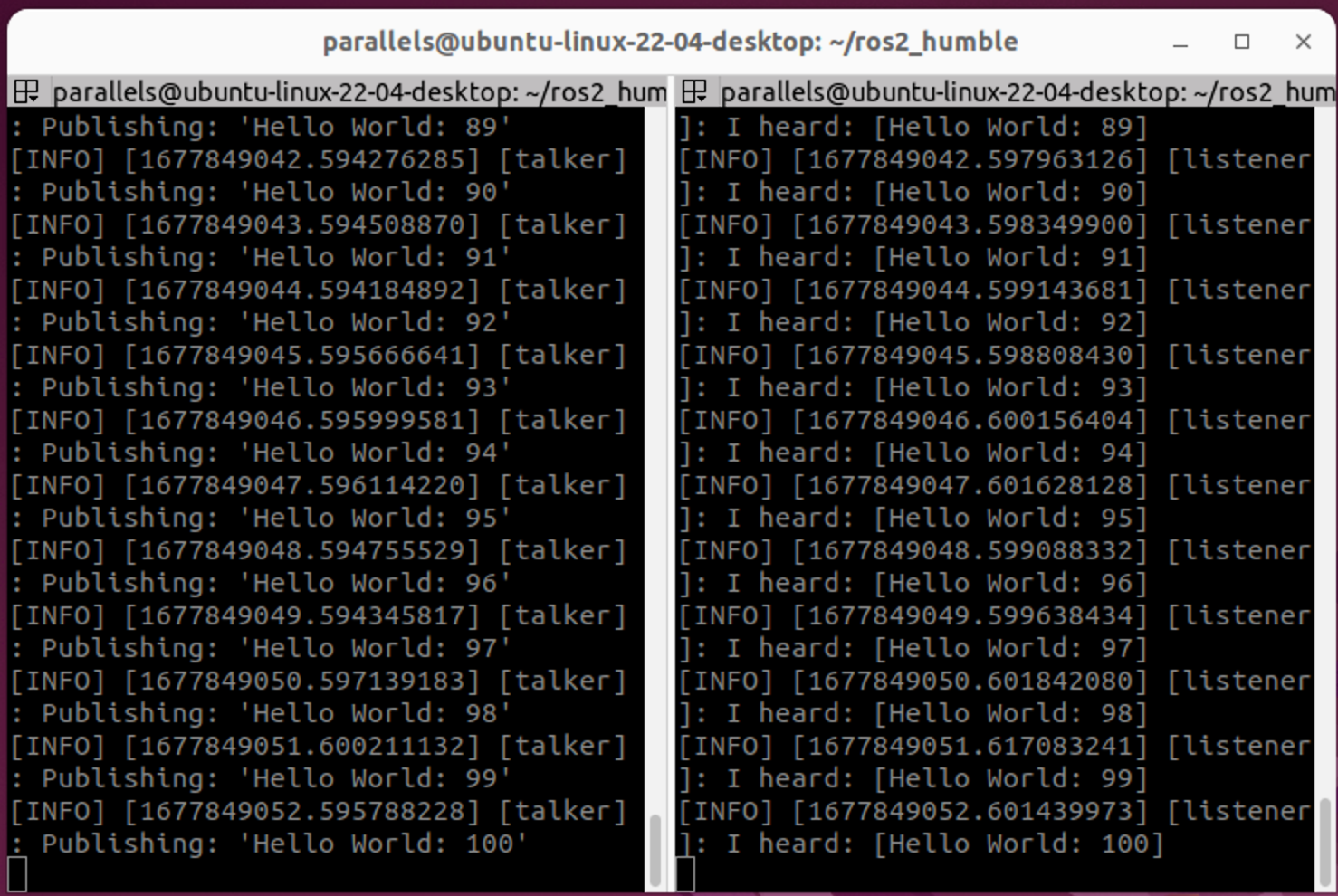
其余遇到的坑已经不记得了,在安装的时候还是需要仔细一些。在运行的每一步的时候要多观察输出,出现任何错误都可能导致后续安装失败。最后使用talker和listener简单测试一下。